On Wednesday we had an extensive testing period. Following a line is more difficult than you might think it is. A big problem for us was bridging gaps in the line, because the range of the robot to look for the line was too small. To fix this issue we extended the area by driving foreward longer and then looking left and right. After that we tested the system which is responsible for evading obstacles in its way. We were quite surprised. It worked nearly perfect and only small corrections had to be made.
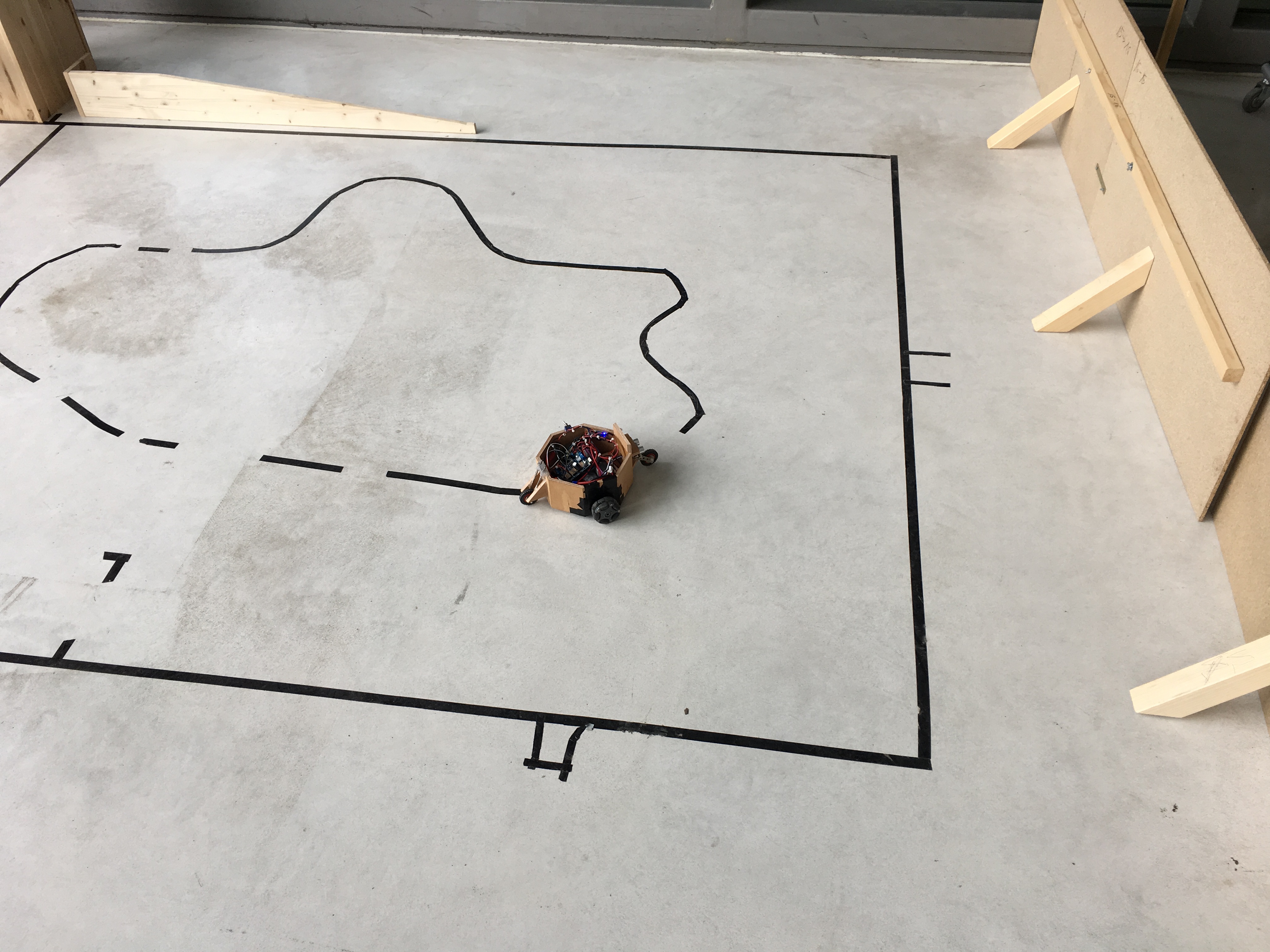
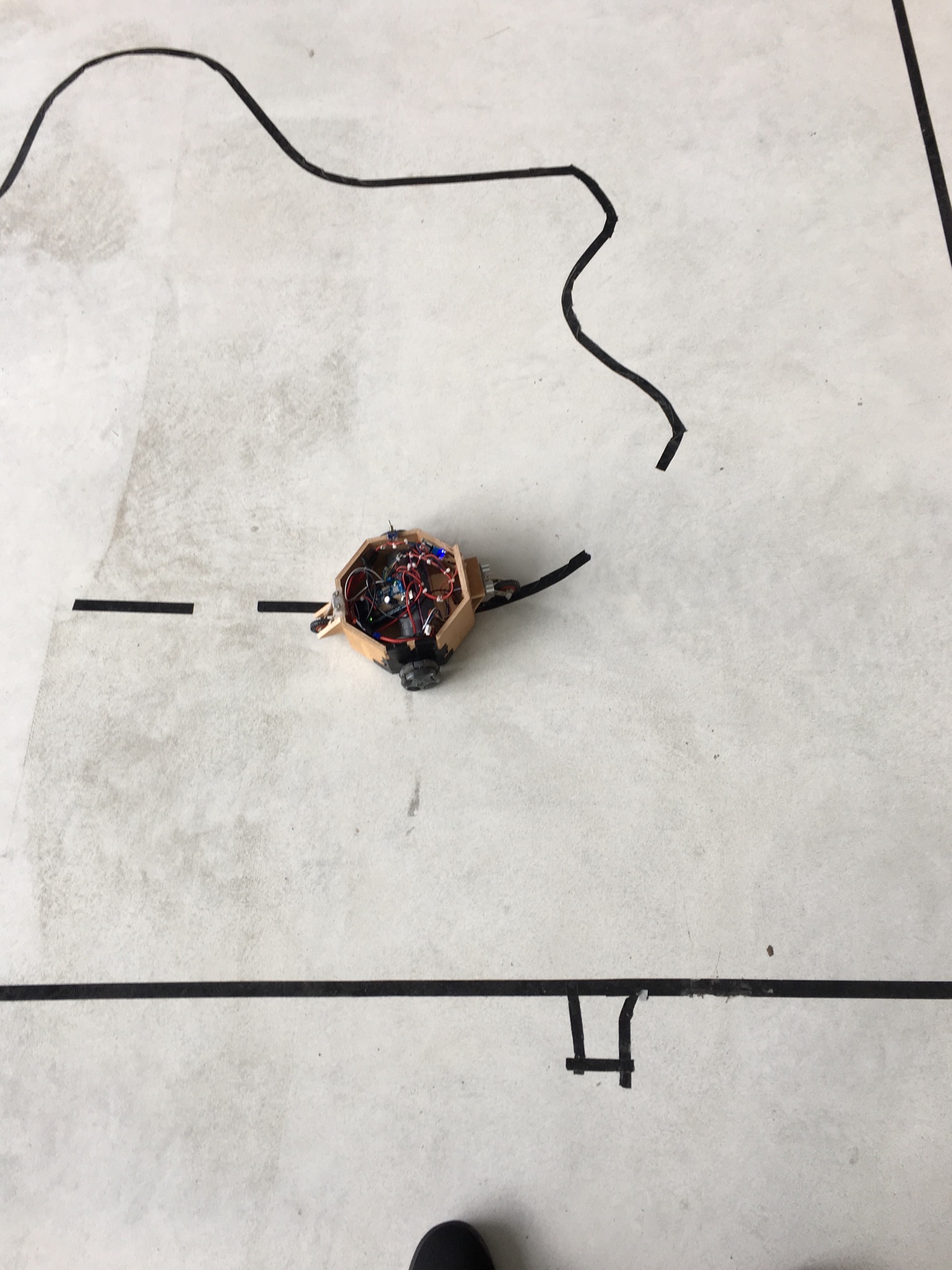
The highlight of the day was the first time the robot had to drive the whole race course we had built for it. After a couple of corrections of the circuit because of incorrect drawing of the line the final test was successful. Finally! We are ready for the competition!
(author: Christopher)