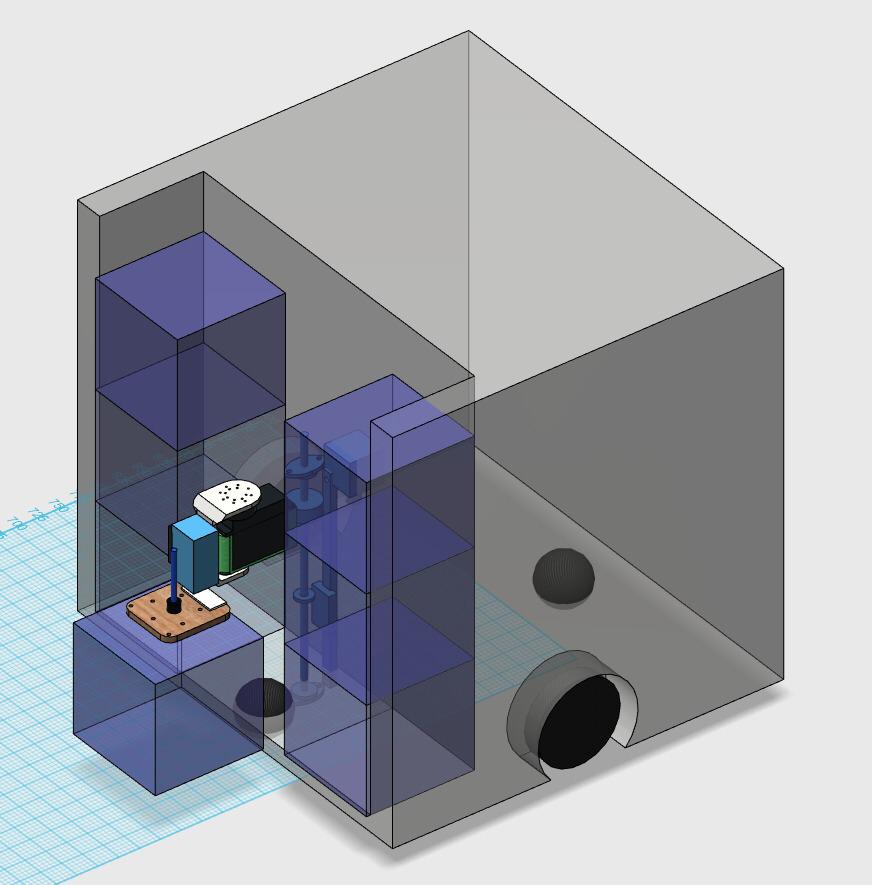
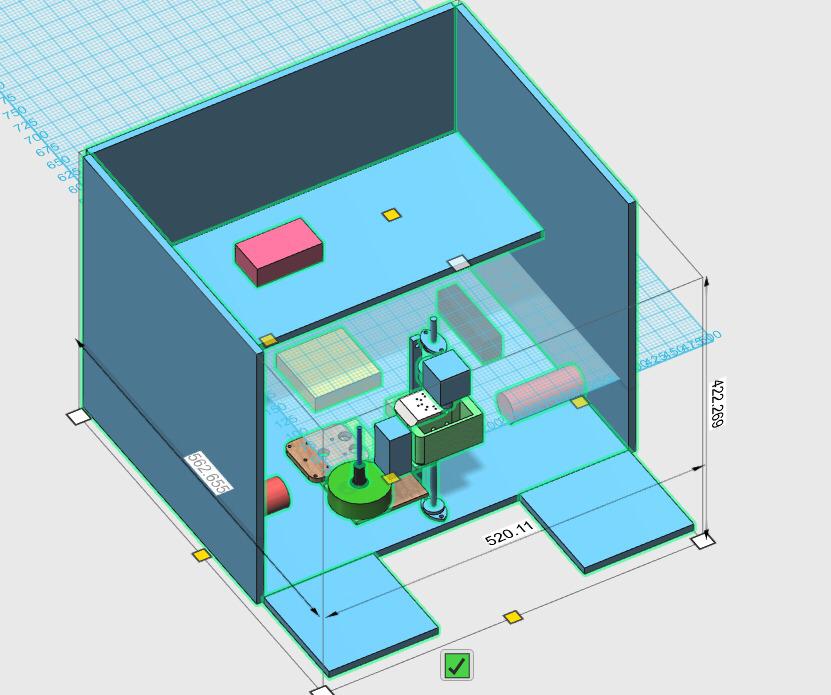
We are mostly done with planning our robot. It took us quite a while because we had many different ideas for solving technical and tactical problems. We had the idea to store the tokens in our robot and then distribute them to the areas where we want them to go. We do not tell you which zones we are going to occupy but we have planned our strategy very well.
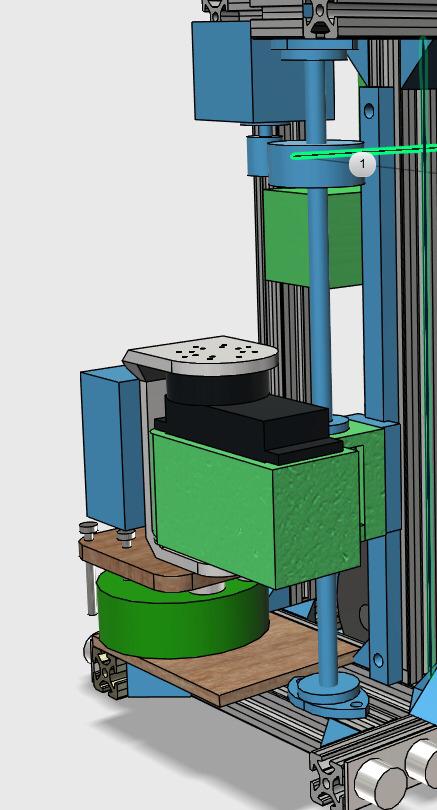
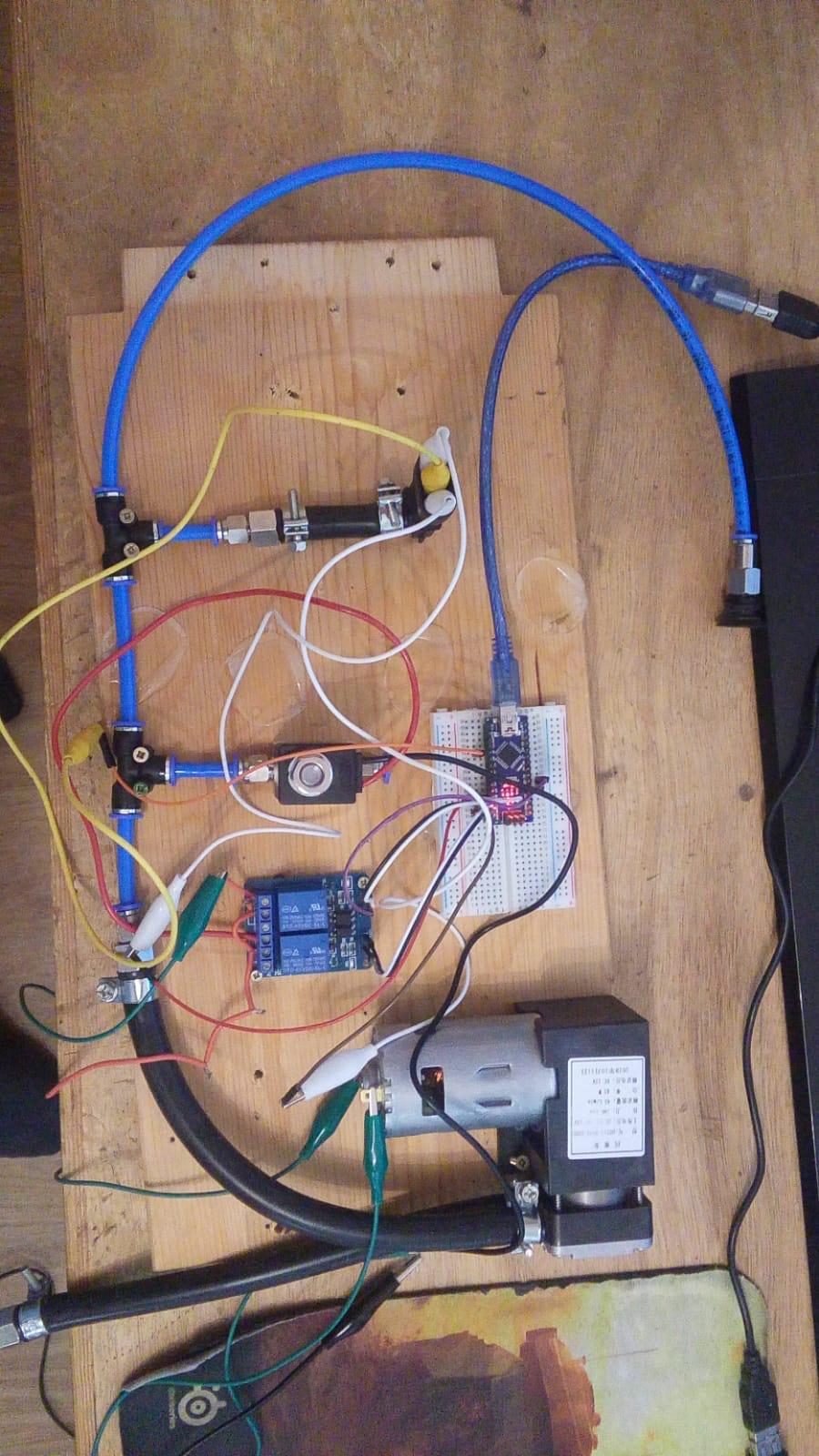
To pick up the tokens we want to rely on a suction cup with negative pressure. We want to store a total of six tokens in our robot. We haven’t written any code yet so there is nothing in our GitLab. We will inform you when we make progress.

(author: Tobias)