Besides preparing for school, we used our free time during the autumn holidays for further progressing on our bots. First of all we want to thank Henrik, a Eurobot referee, who visited us a few days ago and gave us very helpful feedback on our robots.
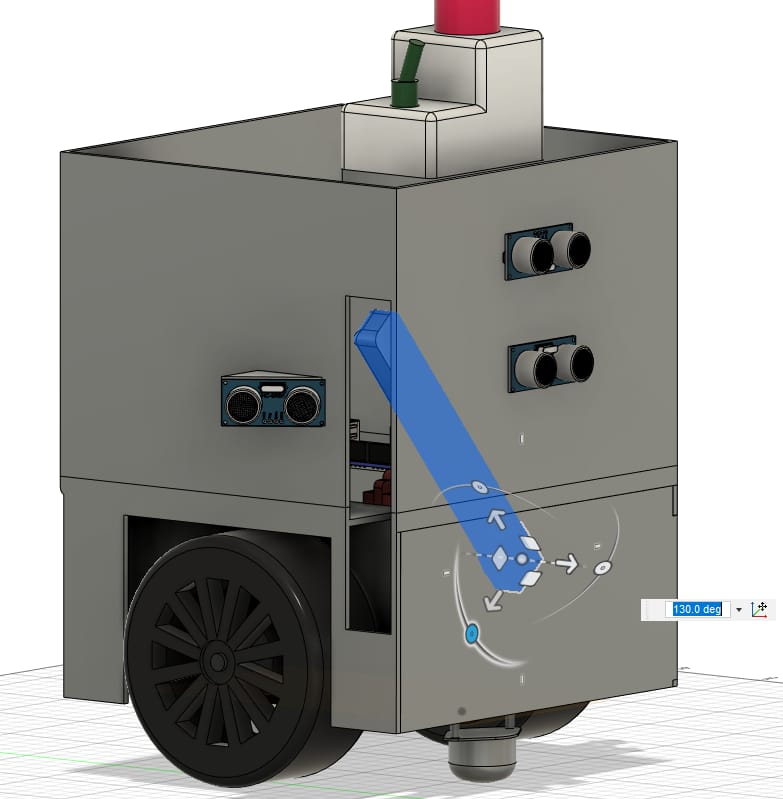
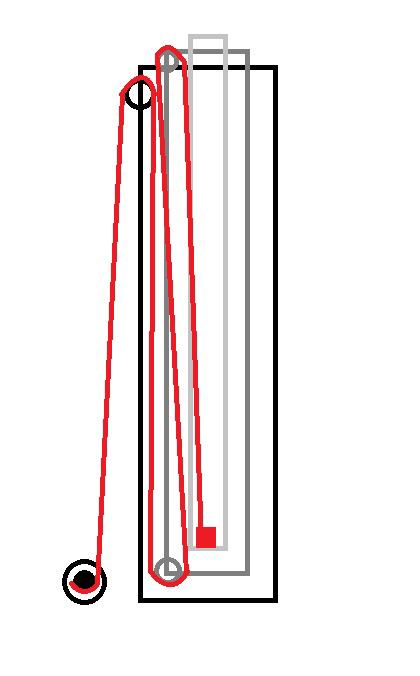
Last week we finally carved out where exactly we want to place the extending arm of the small bot. In the pictures below you can see how we improved the way its mechanism will work.
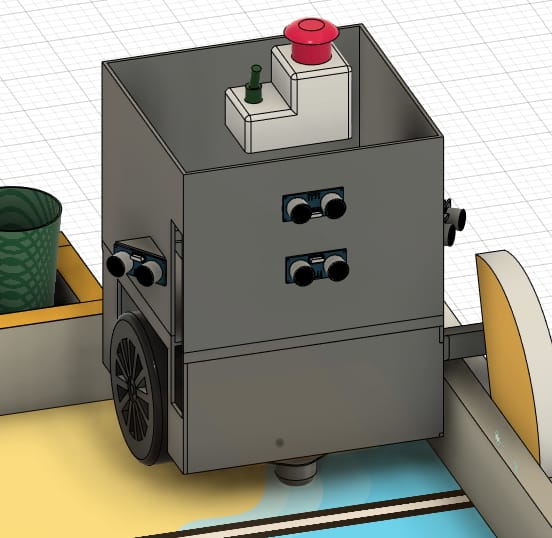
Additionally, the main mechanism of the lighthouse is nearly finalized. It consists of three segments which can extend after the small bot pushed a button at the bottom. After that the LED on top is switched on and a DC motor lets a spherical mirror or an object of another material rotate around it.
We also continued working on the big bot and we are glad to see our PS Eye cameras working well. That means we can already evaluate the weather vane. In order to enable our gripper to better navigate inside the buoys and to generally have a better grip, we implemented some more changes which you can see in the pictures below. We also decided using only three grippers instead of four. Even if that means it is no longer possible for us to collect all five buoys, we have to do it because we would otherwise exceed the maximum perimeter.
(author: Tjorben)