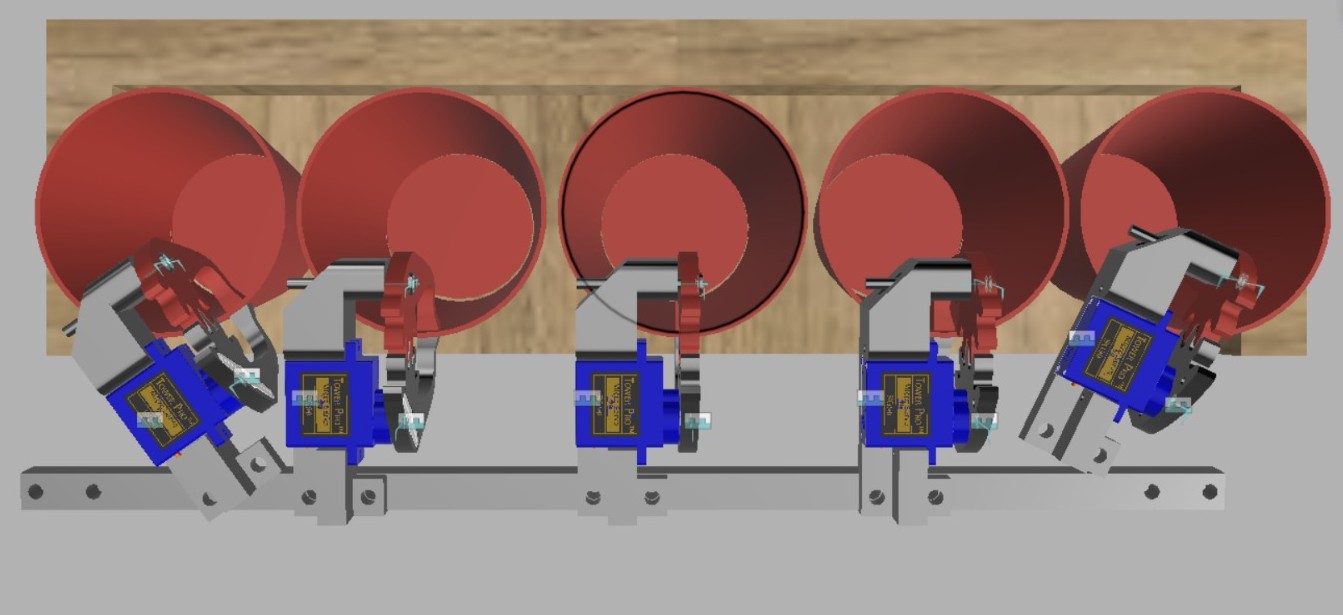
In the last few days we created a new model of the arm of our big bot. In the end, we decided to use five grippers instead of four. And instead of two geared gripper parts, which both move in action, we will now use only one mobile and another static one. Like that it’s still useful but cheaper. Of course we have the following two main priorities for our hardware and software as well: maintainability & reusability. They are always part of our work.


Last but not least our DC motors and encoder arrived and they work properly.
(author: Tjorben)